
I'm
Shambhuraj Anil Mane
Robotics Engineer from WPI university
Motion Planning Engineer, ROS and ROS2 Developer, Reinforcement Learning Enthusiast

I am a master's student in my freshman year at Worcester Polytechnic Institute.
I currently work on two projects, Motion planning for multi-agent path finding specifically Conflict based algorithms and Reinforcement learning as a local planner for hierarchical motion planning.
My course work includes Foundations of Robotics, Motion Planning, and Reinforcement Learning.
I have 2.5+ years of expertise in Technical Publication as a Senior System Engineer at Infosys Ltd in the aerospace industry.
I am the Robotics team lead for the USK4W organization, which promotes robotics education in rural areas.
I am expressing my strong interest in securing a Summer internship 2024.
As a dedicated and highly motivated student, I am excited about the opportunity to gain hands-on experience and contribute to the success of your organization.
Worcester Polytechnic Institute | August 2023 - Present
Coursework:
Motion PlanningSavitribai Phule University | August 2016 - November 2020
Coursework: Mechatronics, Mechanical System Design, Product Design and Development
Manipulation and Environmental Laboratory, Worcester, MA | Jan 2024 - Present
Developing a motion planning algorithm for in-hand manipulation of the object with variable friction arm that incorporates the object start and goal region, orientation of the object while planning the efficient trajectory.
Cognitive Medical Technology Laboratory, Worcester, MA | Aug 2023 - Dec 2023
Built Concentric Tube Robot (CTR) consist of three curved tubes nested inside of each other resulting in a surgical instrument with a high degree of dexterity with 3D printing, Laser cutting and Tube fabrication methods and troubleshooting
Infosys Limited, Mysore, India | July 2022 - July 2023
Collaborated with a team of 10 and delivered 500+ production orders in CATIA and simulation in SAP 3D Visual Enterprise.
Infosys Limited, Mysore, India | July 2022 - July 2023
Analyzed and organized technical information and developed 150+ engine manuals and service bulletins.
Product Innovation Lab, Maharashtra, India | July 2018 - July 2019
Represented the lab at several conferences and industry official visits and secured funding for 2 projects.
Click the Options from below list to see the description
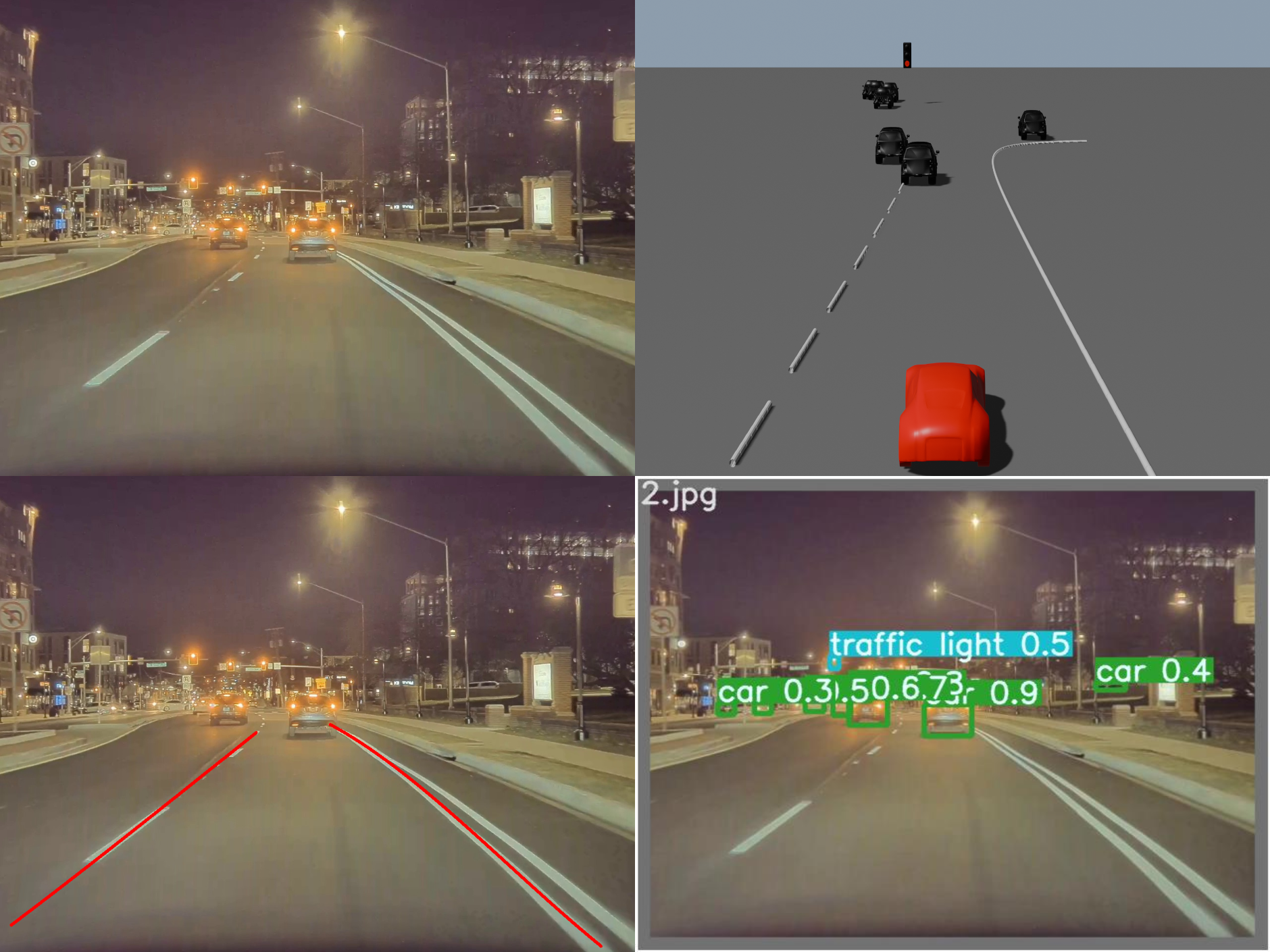
Developed a comprehensive computer vision system for self-driving cars,implementing advanced features such as vehicle, traffic light and lane detection and classification using multiple deep learning models- YOLO-v7, Cascade-LD, Depth-Anything.
Github
Conducted 3D Reconstruction on a custom dataset utilizing images captured with an iPhone 11 camera. Camera calibration was executed using openCV, while camera pose estimation was achieved through VisualSFM.
Github
Applied NeRF to render photorealistic novel views of scenes using differentiable rendering techniques for image projection.
Github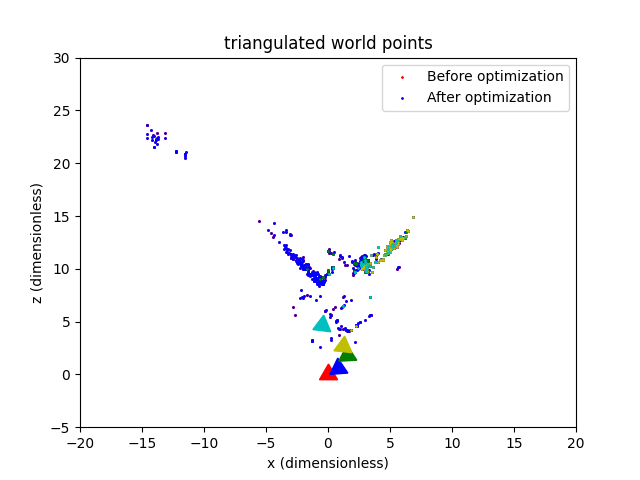
Performed 3D Reconstruction by applying SfM technique and integrating Feature matching, Epipolar geometry, PnP RANSAC, Visibility Matrix and Bundle adjustment techniques on 5 images of a glass building.
Github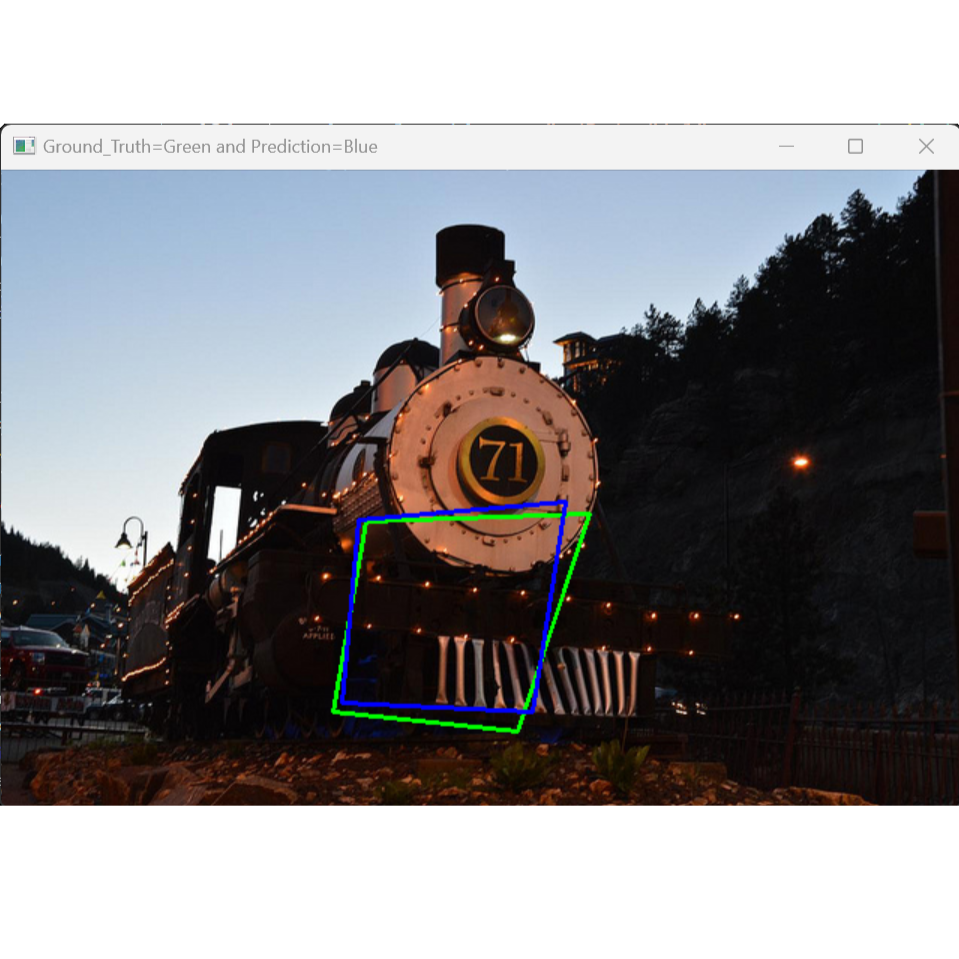
Homography Net involves designing and training Convolutional Neural Network (CNN) to estimate Homography matrix between 2 images. This CNN includes multiple convolution layers, max pooling and linear layers.
Github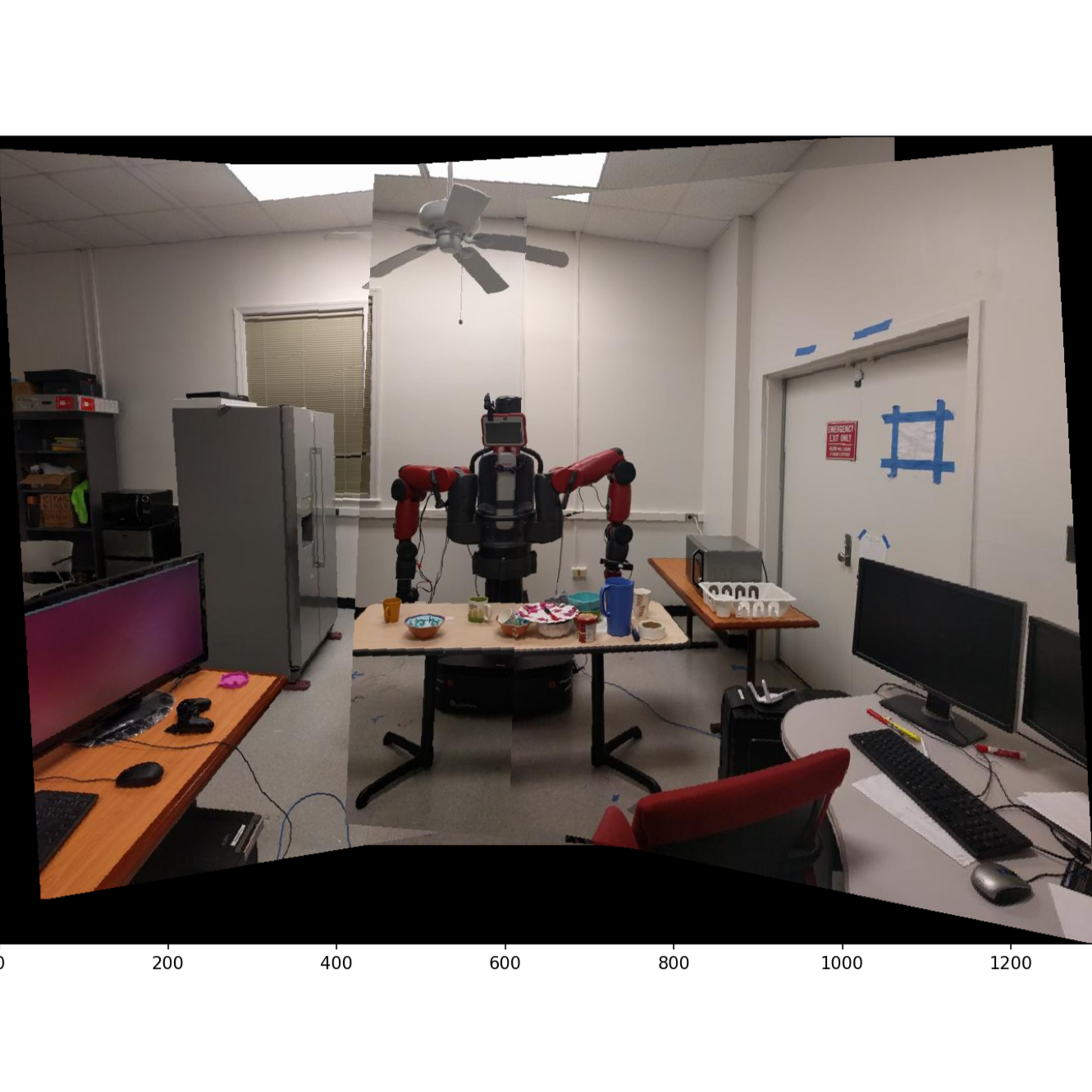
The purpose of this repository is to stitch two or more images in order to create one seamless panorama image. The functions covered are Corner detection, Adaptive Non-Maximal Suppression, Feature Matching, RANSAC for outlier rejection, Homography estimation and Blending.
Github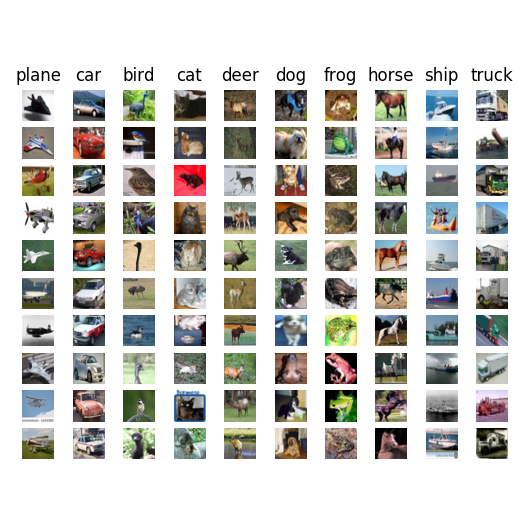
This project implemts a baseline convolutional neural network, few techniques to improve its accuracy, along with implemention of ResNet, ResNeXt and DenseNet architectures.
Github
Executed boundary detection pipeline by applying filter banks, specifically implementing DoG filters, Leung-Malik Filters and Gabor Filters, to produce a texton map capturing image texture through clustered filter responses.
Github
Implemented Improved Conflict-Based Search (ICBS) algorithm, incorporating extensions like prioritizing conflicts and bypassing conflicts with consideration of kinodynamic constraints and bounding box suitable for real time application.
Github Report
The robot is equipped with a 2D Lidar sensor, RL-based path planner provides optimal paths to given target pose independent of map environmennt. Our contribution is to plan paths using Proximal Policy Optimization (PPO) and Actor Critic (A2C) implementation.
Github Report
Designed and developed Open-manipulator Arm, which included implementing forward and inverse kinematics algorithm nodes in ROS2 and 3D robot visualization in gazebo. Also, developed PID for velocity and current controllers for the robot’s end effector. Configured the Open-manipulator Arm with MoveIt 2 for real-time planning and pick-and-place applications
Github
This project presents the results of implementing an A* combinatorial planner and a Probabilistic Roadmap (PRM) sampling-based planner for navigating a firetruck and an arsonist Wumpus through a cluttered environment with burning obstacles. The goal was to compare the performance of these two motion planning approaches in terms of computational efficiency, path planning optimality, and overall firefighting effectiveness.
Github Report
This project presents implemention of an Hybrid A* path planner to park three vehicles of increasing complexity into a tight space. The vehicles - a delivery robot, car, and truck with trailer - each have different steering constraints. A simulated 2D environment was created with obstacles, and configurations space was modeled accounting for nonholonomic constraints.
Github Report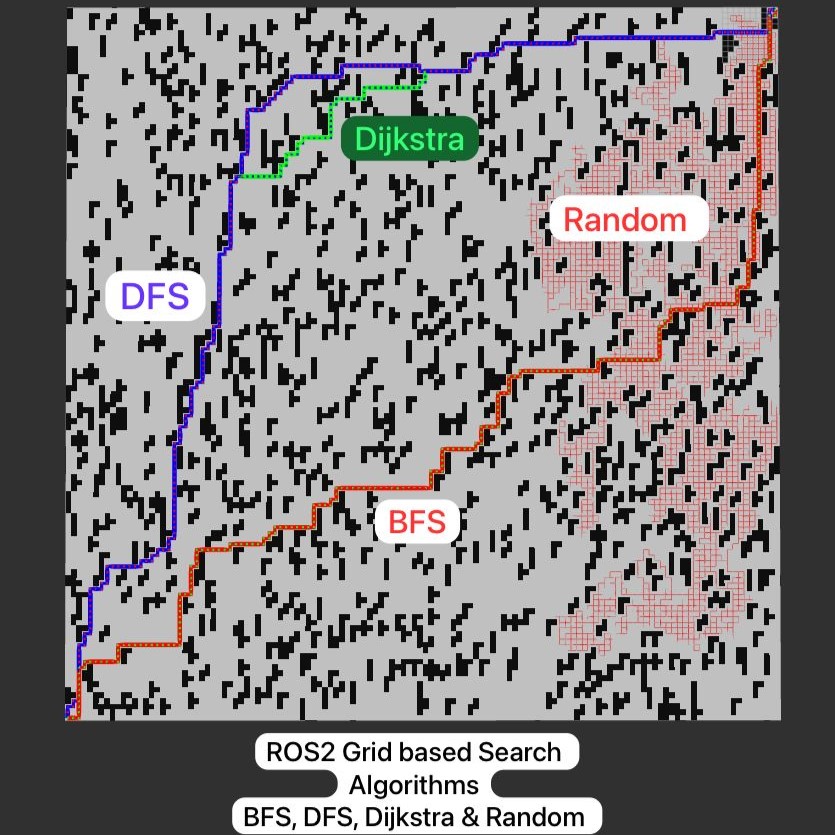
Implemented algorithms like BFS, DFS, Dikjstras, A* with a configurable density of obstacles and conducted a comprehensive comparative analysis of these algorithms
Github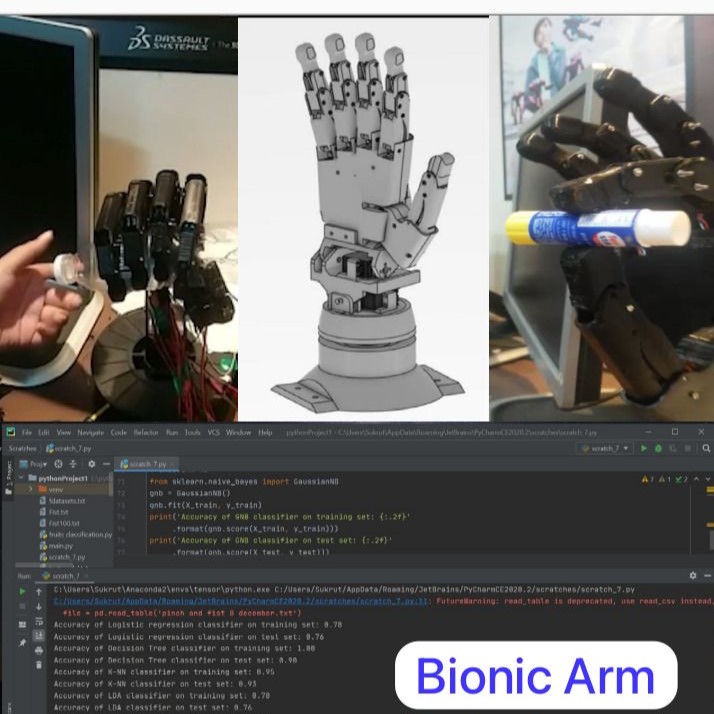
Designed an 11 dof prosthetic arm in Solidworks with electronic circuit and developed 3D printed functional prototype. ◦ Developed a machine learning model that utilized SVM and random forest algorithms for the classification of datasets comprising over 10k sample points per individual from three subjects. Designed model to analyze EMG sensor data, demonstrated a notable average accuracy of 89% in successfully predicting pinch and fist grasp movements.
Github Report CAD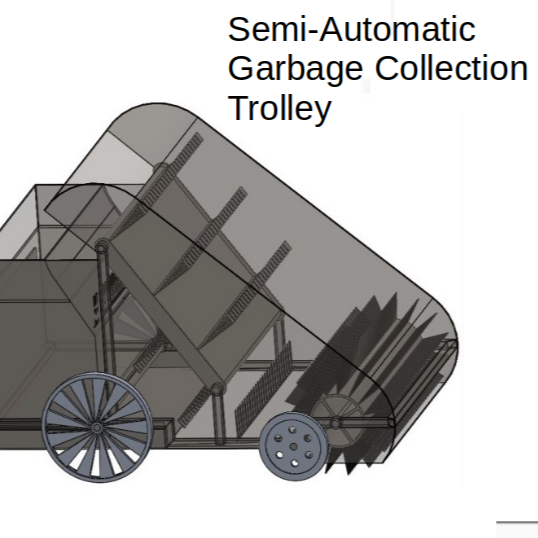
A Semi Automatic Battery Operated (SABO) garbage cleaning vehicle is designed. It uses the same principle of manual sweeping method but with a long continuous brush that rotates at certain RPM in an enclosed trolley. It reduces labour effort as well as dust pollution, thus making the product a social and environmental advantageous.
CAD